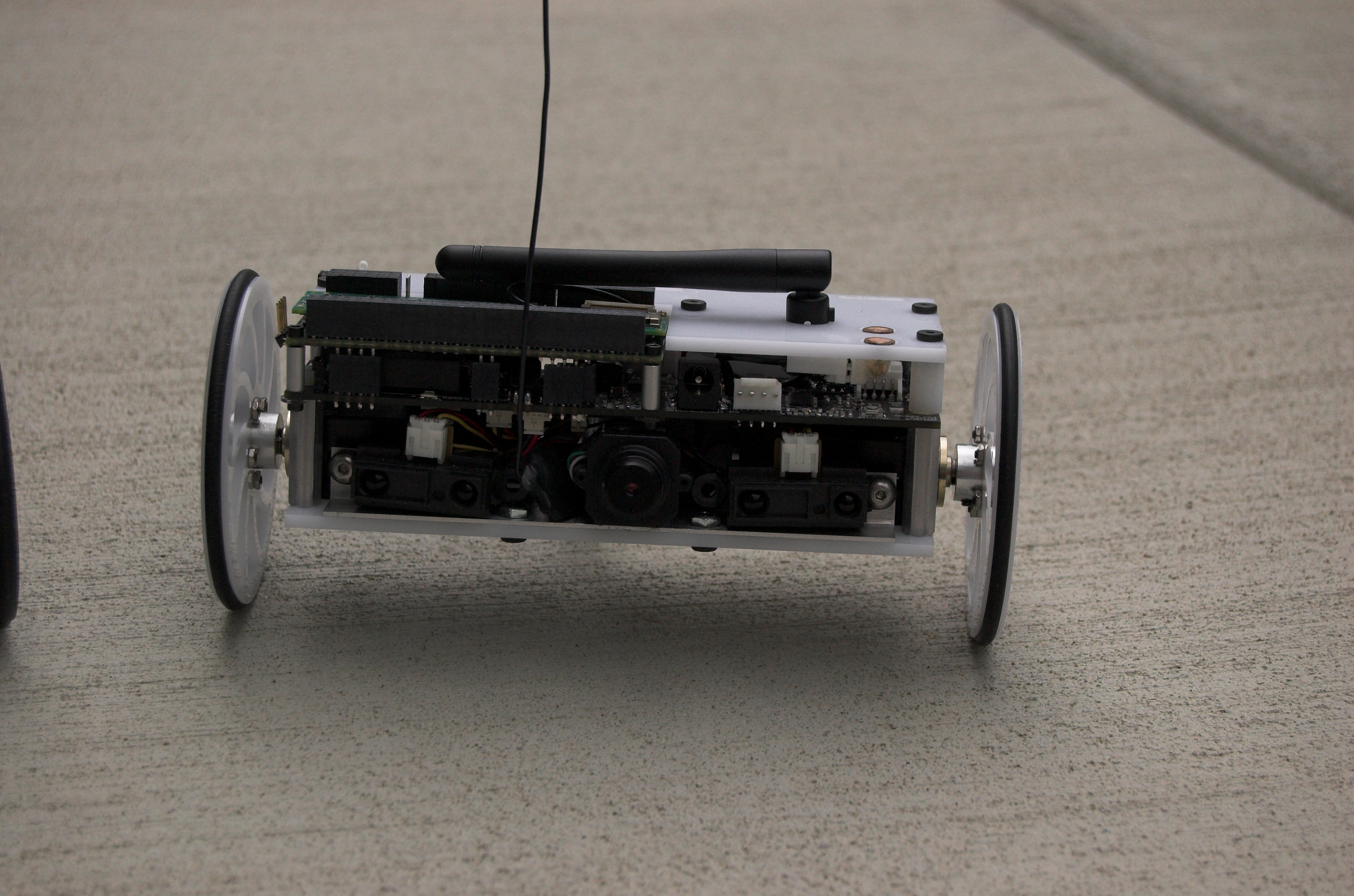
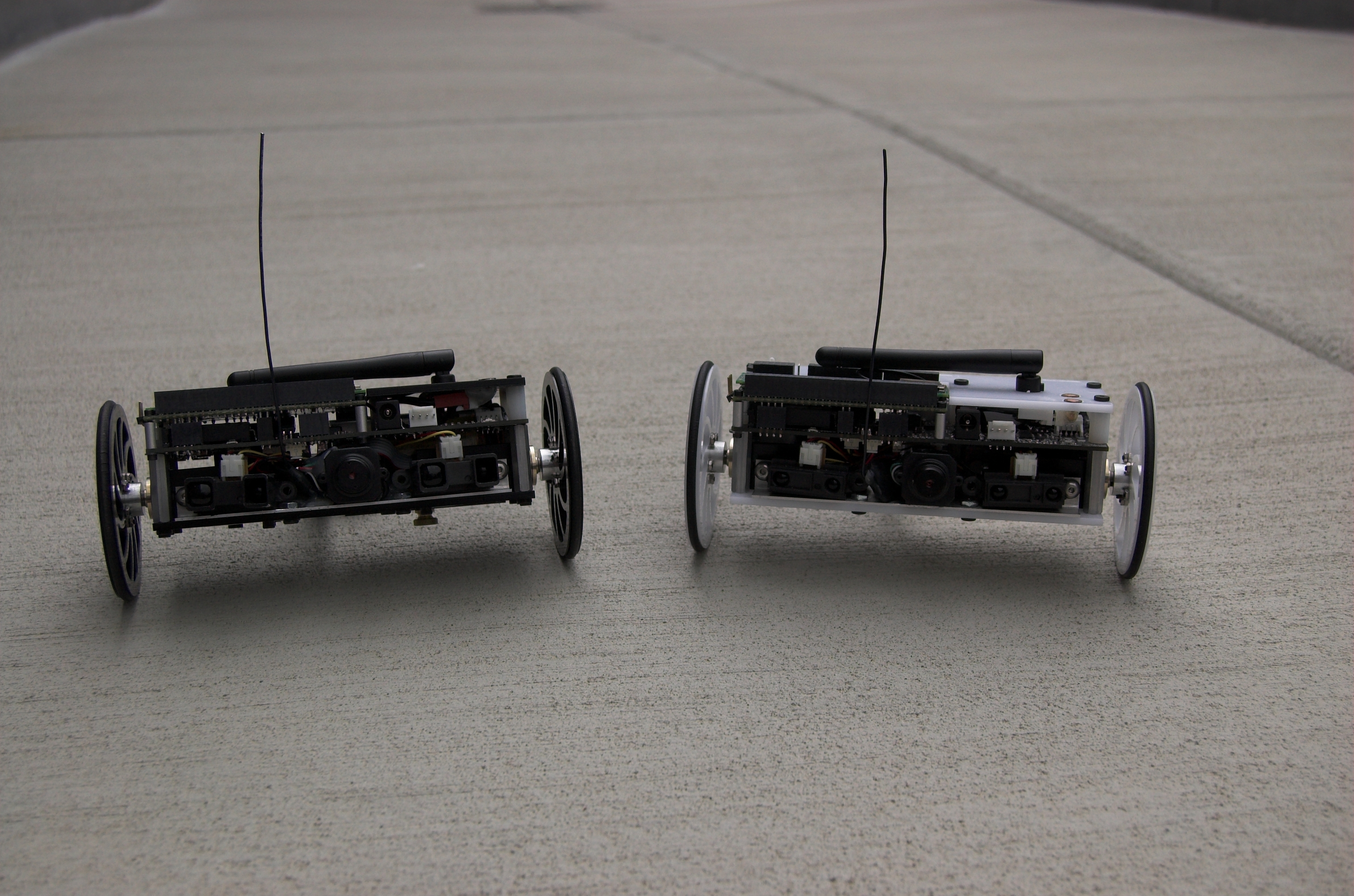
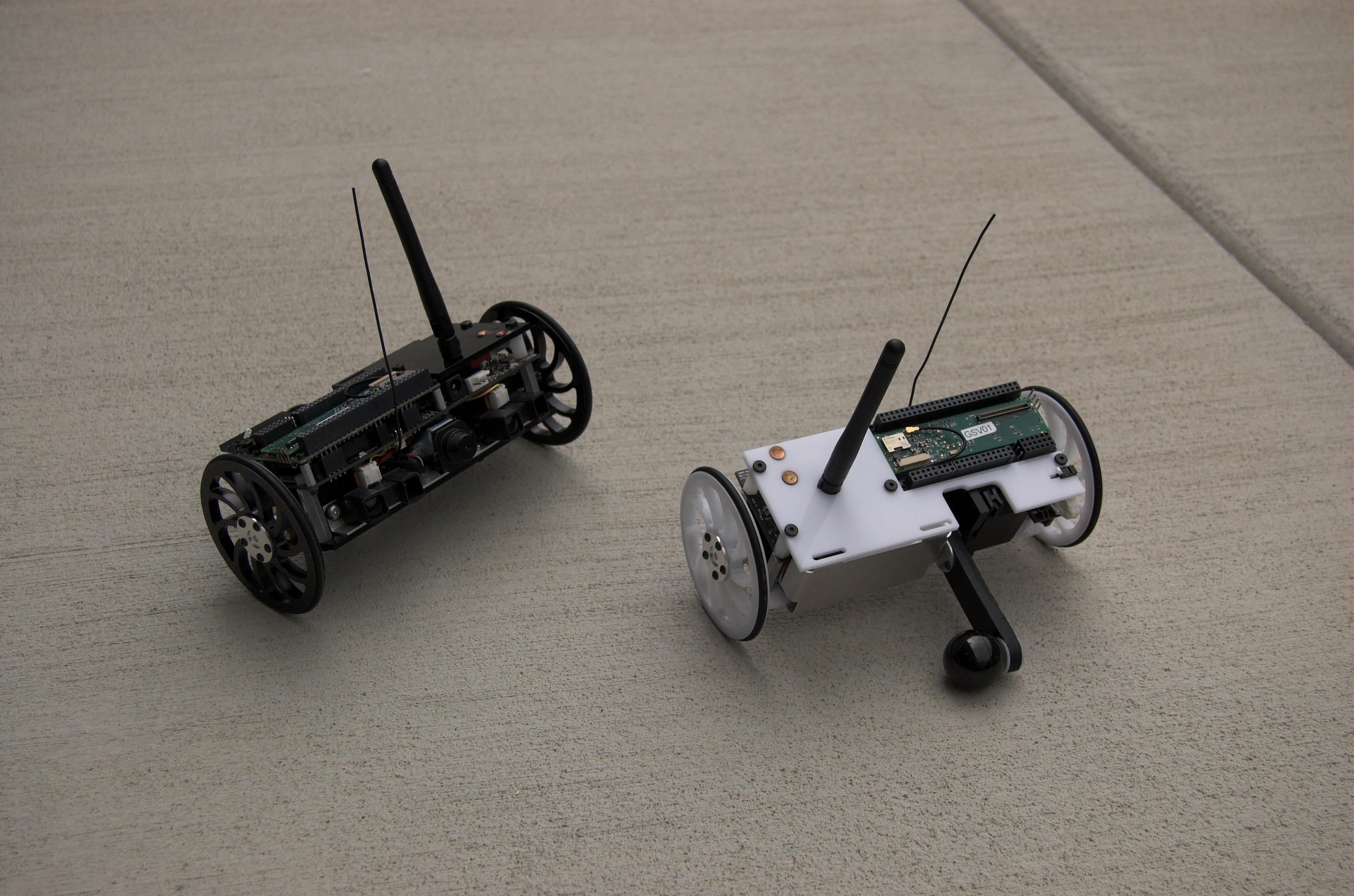
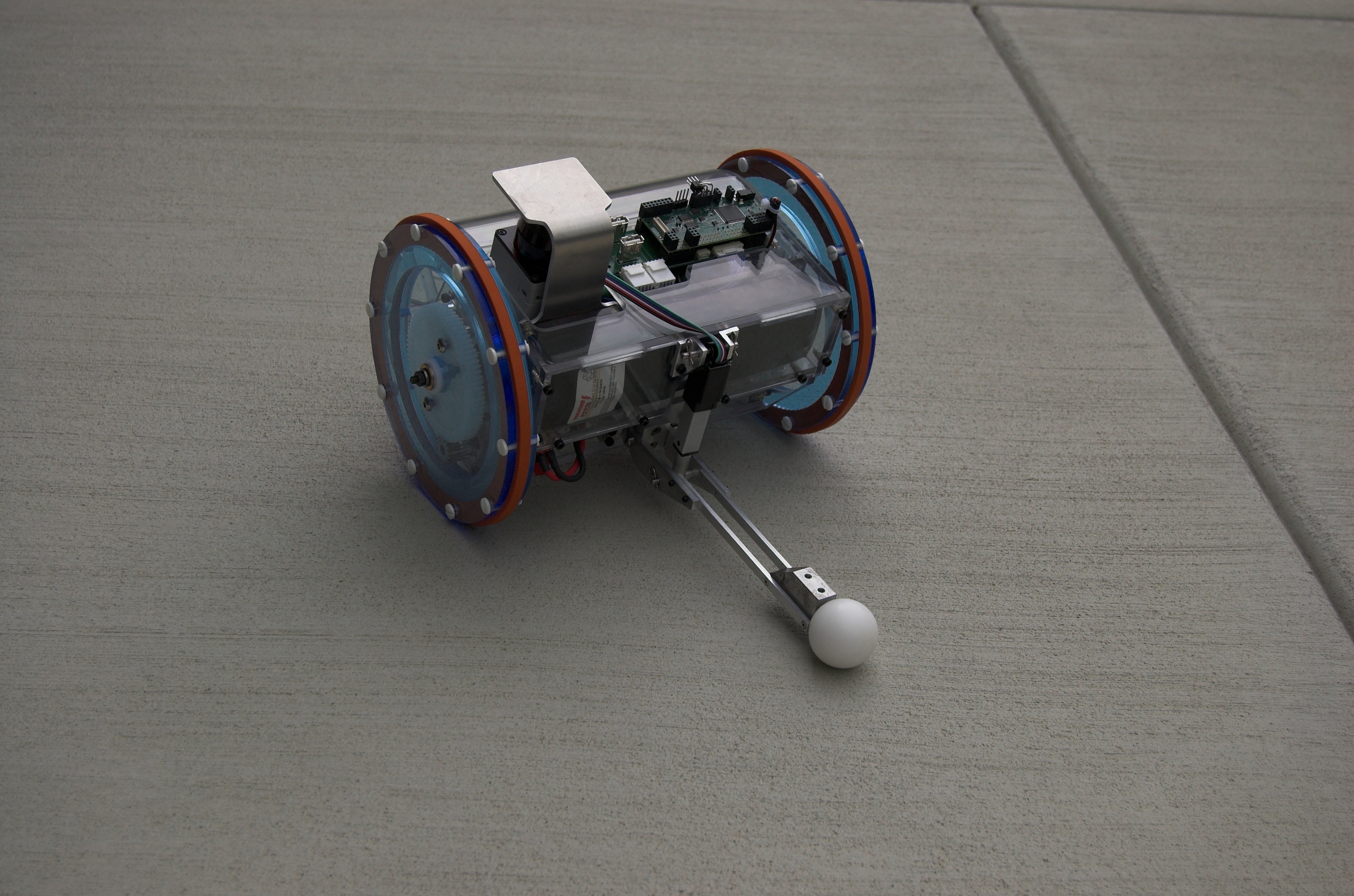
The Explorer is one of several robots designed at the Center for Distributed Robotics at the University of Minnesota. Its purpose is to provide research scientists with an advanced, safe, and easy to use mobile robotic platform. While it may look deceptively similar to its predecessor, the eROSI, it is different in all aspects of design - from the mechanical structure and electrical hardware, to its software processing capabilities.
The Explorer robot has a specially designed power management system developed to provide a virtual gas gauge with respect to available power. In addition, there is integrated battery management and charging capabilities. Combined, these compatibilities allow the Explorer to autonomously recharge itself within a docking bay.
The Explorer is used in robotics demonstrations hosted by the Center for Distributed Robotics. The robot is controlled using a Nintendo Wiimote controller; this creates an intuitive and fun setting for students to experience robotics research.
Specifications
Length:
140 mm
Width:
60 mm
Height:
45 mm
Sensors:
Analog Camera with Transmitter
Wheel Encoders
Dual axis accelerometer
Computation:
400 MHz Verdex Gumstix
Publications
Qingquan Zhang, Gerald Sobelman, and Tian He, "Gradient-Based Target Localization in Robotic Sensor Networks", The Pervasive and Mobile Computing Journal, Volume 5, 2009.
Monica Anderson and Nikolaos Papanikolopoulos,"Implicit Cooperation
Strategies for Multi-robot Search of Unknown Areas", Journal of
Intelligent and Robotic Systems, Volume 53, 2008.
Loren Fiore, Duc Fehr, Robot Bodor, Andrew Drenner, Guruprasad
Somasundaram, and Nikolaos Papanikolopoulos, "Multi-Camera Human Activity Monitoring", Journal of Intelligent and Robotic Systems, Vol. 52, 2008.
Apostolos Kottas, Andrew Drenner, and Nikolaos Papanikolopoulos, "Intelligent Power Management: Promoting Power-Consciousness in Teams of Mobile Robots", Proceedings of the 2009 IEEE International Conference on Robotics and Automation (ICRA), 2009.
Hyeun Jeong Min, Andrew Drenner, and Nikolaos Papanikolopoulos, "Vision-based Leader-Follower Formations with Limited Information", Proceedings of the 2009 IEEE International Conference on Robotics and Automation (ICRA), 2009.
Loren Fiore, Guruprasad Somasundaram, Andrew Drenner, and Nikolaos Papanikolopoulos, "Optimal Camera Placement with Adaptation to Dynamic Scenes", Proceedings of the 2008 IEEE International Conference on Robotics and Automation (ICRA), 2008.
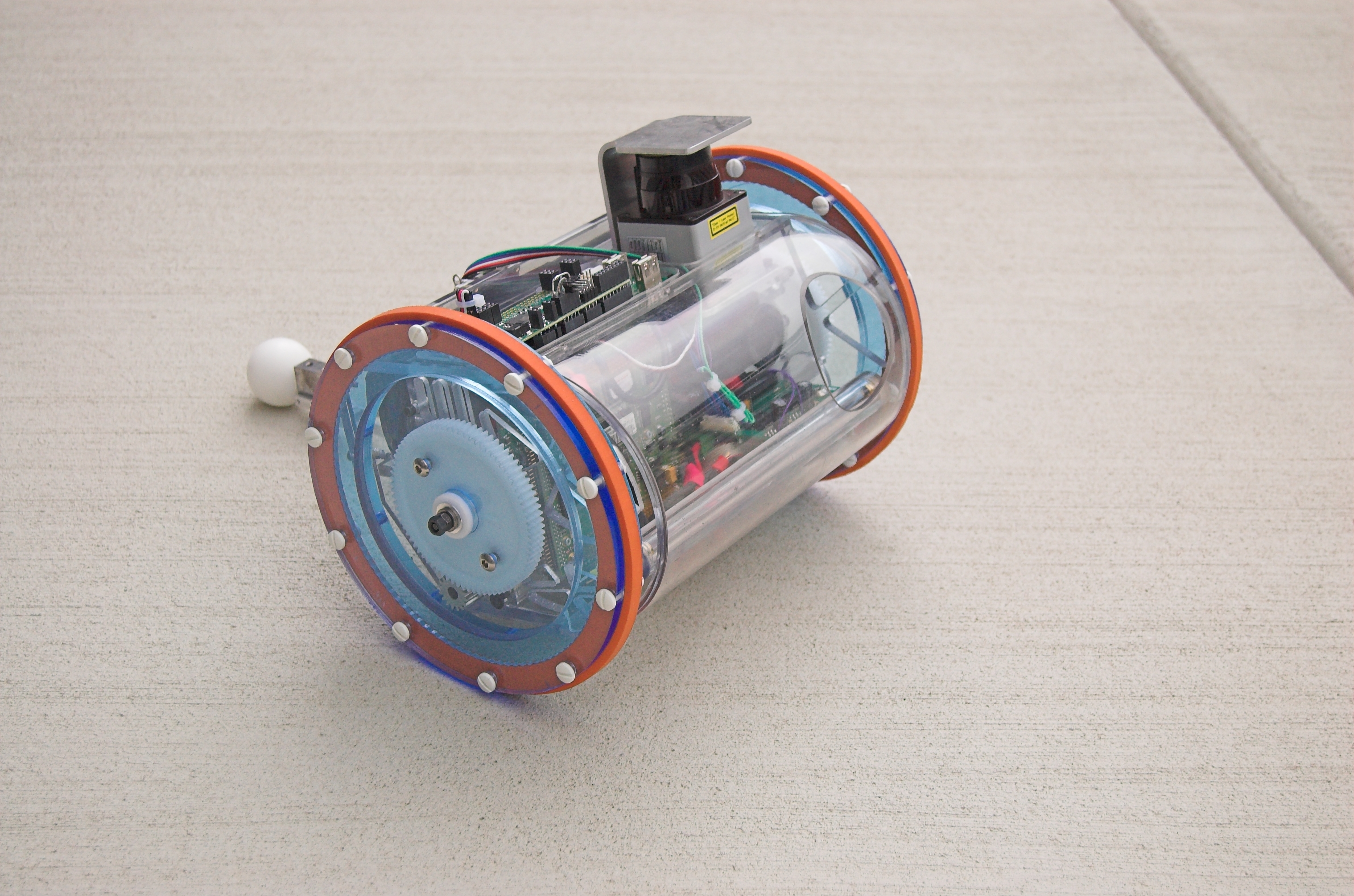
Microvision Robot
Another project at the Center for Distributed Robotics is the Microvision robot. Taking the Explorer as inspiration for its base design the Microvision comes equipped with a laser scanner, an improved camera, RGB-D sensor, and a more powerful processing unit. The increase in computing power explains the size differences, as the Microvision robot is equipped with a PICO-ITX miniboard that can process data far faster than the Explorer's Gumstix. Computer vision algorithms can be performed on-board this robot in real-time. Robotic applications are readily developed using the Robot Operating System and commercially available hardware making the Microvision a robust research platform.
Specifications
Length:
290 mm
Width:
240 mm
Height:
210 mm
Sensors:
IMU
Digital Camera
Wheel Encoders
Hokuyo URG-04LX
Asus Xtion PRO LIVE
Computation:
PICO-ITX miniboard with Intel Atom N2800 dual core processor and 2 GB of RAM
Demonstration and Videos
Publications
William J. Beksi and Nikolaos Papanikolopoulos, "Point Cloud Culling for Robot Vision Tasks Under Communication Constraints", Proceedings of the 2014 IEEE International Conference on Intelligent Robots and Systems (IROS), 2014.
Duc Fehr, William J. Beksi, Dimitris Zermas and Nikolaos Papanikolopoulos, "Occlusion Alleviation through Motion Using a Mobile Robot", Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), 2014.
Pratap Tokekar, Vineet Bhatawadekar, Duc Fehr, and Nikolaos Papanikolopoulos, "Experiments in Object Reconstruction Using a Robot-mounted Laser Range-finder", 17th Mediterranean Conference on Control and Automation, MED'09.
Duc Fehr and Nikolaos Papanikolopoulos, "Using a Laser Range Finder Mounted on a MicroVision Robot to Estimate Environmental Parameters", SPIE Defense, Security, and Sensing International Society for Optics and Photonics, 2009.
Support
The work on these two robots has been supported by the National Science Foundation under the project number #0708344: Collaborative Research: CRI: IAD: Research/Education Infrastructure Based on Modular Miniature Robot Teams.